
About
Experiences
 Aug, 2022 - May, 2023
Aug, 2022 - May, 2023
Publications ( / )
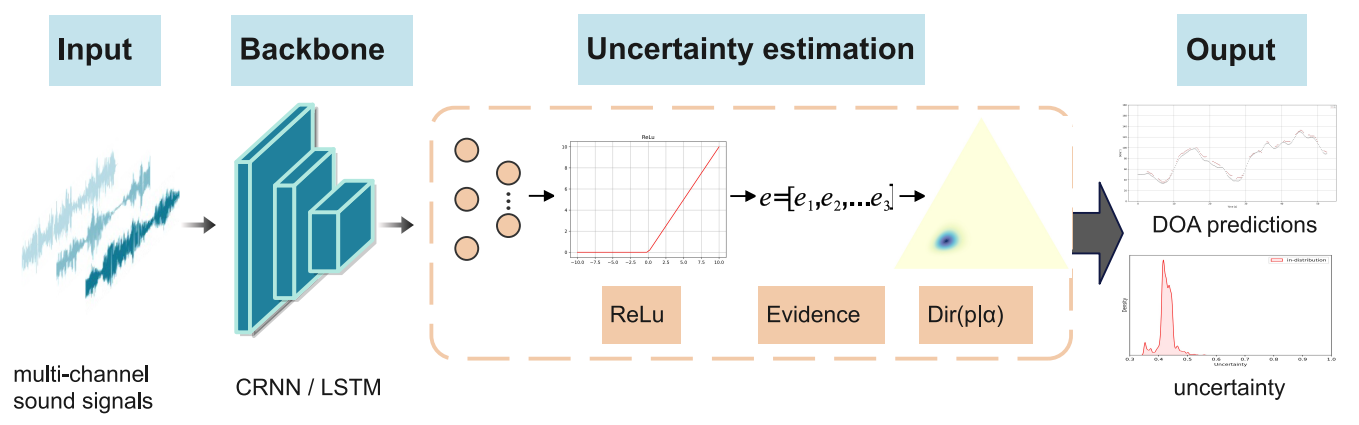
Uncertainty Estimation for Sound Source Localization With Deep Learning
TIM
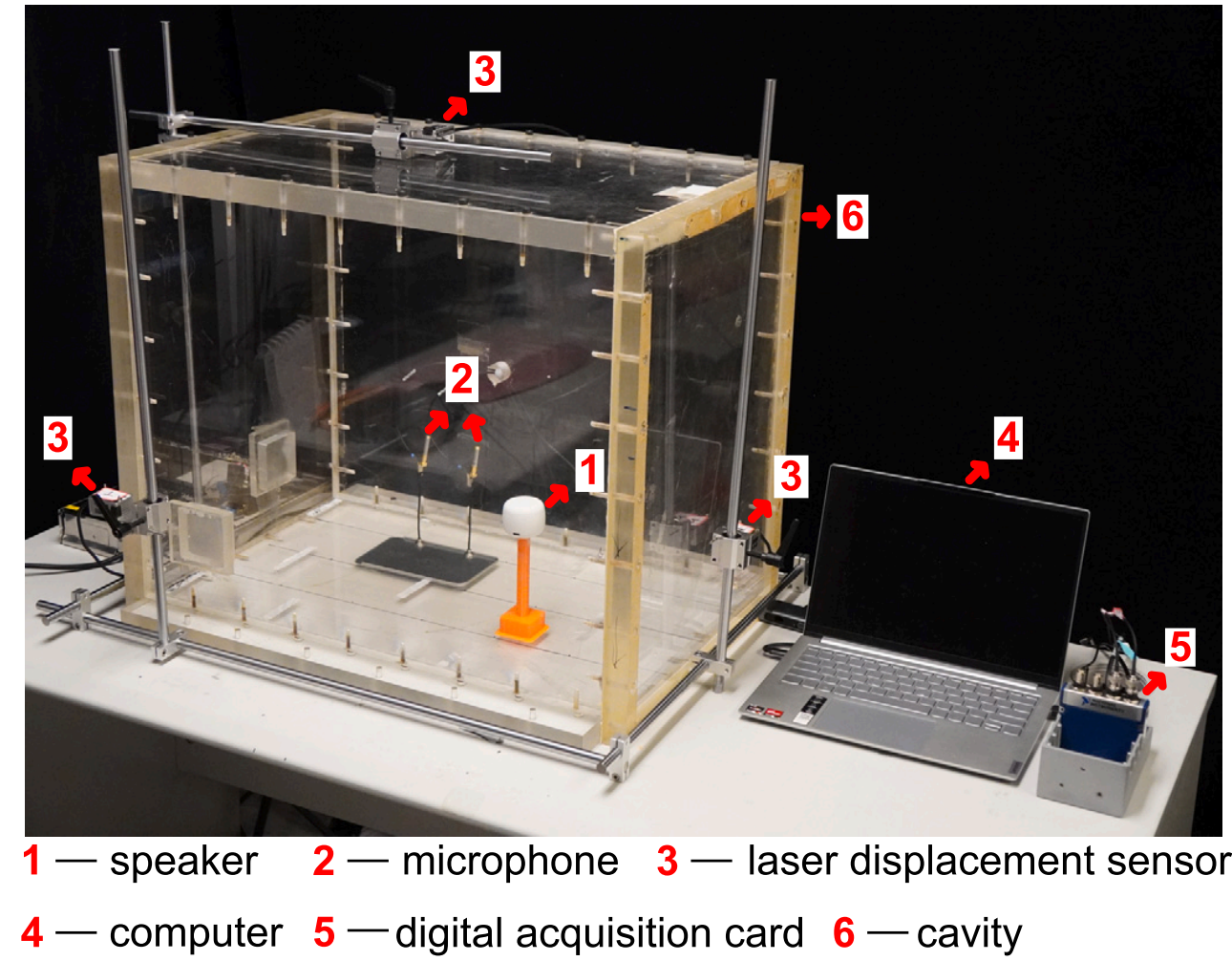
Modal expansion-based data generation approach for deep learning-enabled sound source localization in a
small enclosure
AA